Tag: snake robot
 Operations: An Ethical and Design Perspective Framework for Response Phase")
Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase
Exciting news! Our team has just published a new article titled "Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase" in the journal of Applied Sciences. I am grateful to all my co-authors for their incredible contributions! Hareesh Chitikena, Filippo Sanfilippo, and Shugen Ma. 2023. "Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase" Applied Sciences 13, n

The Redesigned Serpens, a Low-Cost, Highly Compliant Snake Robot
A new paper has been published in the journal of Robotics. The selected article is: Askan Duivon, Pino Kirsch, Boris Mauboussin, Gabriel Mougard, Jakub Woszczyk and Filippo Sanfilippo. The Redesigned Serpens, a Low-Cost, Highly Compliant Snake Robot. Robotics 11(2), 2022. URL, DOI BibTeX I am particularly proud of this work as it is the result of my students' effort. This research is funded by the Department of Mechanical, Electronic and Chemical Engineeri

Invited talk on snake robotics at the 1st Conference on Policing in Smart Cities
Today, I delivered an invited talk at the 1st Conference on Policing in Smart Cities. Title: Snake Robots – State-of-the-art. Abstract: Snake robots could enable applications in demanding real-life operations, such as explorations of earthquake-hit areas, pipe inspections, fire-fighting and search-and-rescue (SAR) activities. This talk explores challenges and possibilities.

Special Issue "Advanced in Snake Robots of Bio-Inspired Robotics"
Dear colleagues, In general, bio-inspired robotics are often regarded as mere biomimicry. However, just as airplanes do not flap their wings like birds and automobiles do not walk like horses, it is not always best to imitate the forms and movements of living creatures in the field of engineering. In other words, Bio-inspired Robotics and Biomimetic Robotics are not the same things. Similar problems exist in snake-like robots, where the initial inspiration may come from living organisms, but

Special Issue "Intelligent Technologies and Robotics"
Dear Colleagues, Robotics is progressing at a much faster pace than ever before. This progress is synergistically stimulated by the cross-cutting, transformational effects of artificial intelligence (AI) and intelligent technologies. It is crucial to foster a greater awareness of this co-creation process and to give adequate consideration to societal needs, sustainability perspectives, and accountability. This Special Issue is open to interdisciplinary approaches, and it aims at exhibiting the

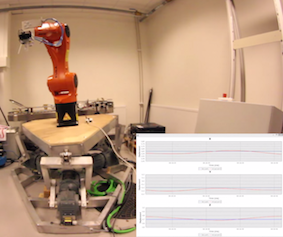
A comparison between a two feedback control loop and a reinforcement learning algorithm for compliant low-cost series elastic actuators
A new paper has been accepted for publication in the Proceeding of the 53rd Hawaii International Conference on System Sciences (HICSS 2020), Maui, Hawaii, United States of America, January 7-10, 2020. The selected article is: Filippo Sanfilippo, Tuan Hua and Steven Bos, A comparison between a two feedback control loop and a reinforcement learning algorithm for compliant low-cost series elastic actuators, in Proceeding of the 53rd Hawaii International Conference on System Sciences (HICSS 20

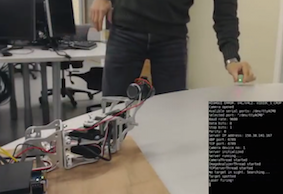
Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism
A new paper has been accepted for publication to the journal of Applied Sciences. The selected article is: Filippo Sanfilippo, Erlend Helgerud, Per Anders Stadheim and Sondre Lieblein Aronsen. Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism. In: Applied Sciences 9.3 (2019). issn: 2076-3417. doi: 10.3390/app9030396. url: http://www.mdpi.com/2076-3417/9/3/396. I thank all my co-author, my students a

Bridging the gap between bio-inspired steering and locomotion: A Braitenberg 3a Snake robot
A new paper has been accepted for publication in the Proceeding of the 15th IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, November 18-21, 2018. The selected article is: Inaki Rano, Augusto Gómez Eguíluz and Filippo Sanfilippo. Bridging the gap between bio-inspired steering and locomotion: A Braitenberg 3a Snake robot. Accepted for publication in the Proceeding of the 15th IEEE International Conference on Control, Automation, Robotics and Vision

SnakeSIM: a ROS-based Control and Simulation Framework for Perception-Driven Obstacle-Aided Locomotion of Snake Robots
A new paper has been accepted for publication in Artificial Life and Robotics, Springer. The selected article is: Filippo Sanfilippo, Øyvind Stavdahl and Pål Liljebäck, “ SnakeSIM: a ROS-based Control and Simulation Framework for Perception-Driven Obstacle-Aided Locomotion of Snake Robots,” Artificial Life and Robotics, Springer, 2018, DOI: 10.1007/s10015-018-0458-6.

NTNU delegation at SWARM 2017 met the award winning pioneer of robotics Prof. Shigeo Hirose
I had the honor to be part of the delegation of the Department of Engineering Cybernetics from the Norwegian University of Science and Technology (NTNU) and to participate to the 2nd International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM), Kyoto, Japan. I presented the following article: Filippo Sanfilippo, Øyvind Stavdahl and Pål Liljebäck. SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion. In Proceeding of the 2nd Internatio

SnakeSIM, our ROS based Framework for POAL of Snake Robots has been accepted for publication at ROBIO 2017, Macau, China
A new paper has been accepted for publication in the Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 2017. The selected article is: Filippo Sanfilippo, Øyvind Stavdahl and Pål Liljebäck. SnakeSIM: a ROS-based Rapid-Prototyping Framework for Perception-Driven Obstacle-Aided Locomotion of Snake Robots. Accepted for publication to the Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 2017.

SnakeSIM, our Snake Robot Simulation Framework for POAL has been accepted for publication at SWARM 2017, Kyoto, Japan
A new paper has been accepted for publication in the Proceeding of the 2nd International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM), Kyoto, Japan, 2017. The selected article is: Filippo Sanfilippo, Øyvind Stavdahl and Pål Liljebäck. SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion. Accepted for publication to the Proceeding of the 2nd International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM), Kyoto, Japan, 2017.
Supervised Theses
| Spring 2015 | |
|---|---|
| Interfacing an EEG Headset with a 3D Simulation Environment for Rehabilitation in Partially Paraplegic,Stroke Victims. Student: Tom Verplaetse; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Robin Trulssen Bye, Filippo Sanfilippo. |
 |
| On the Usage of Single-Electrode EEG Devices for Biometric-Based Person Identification. Students: Guilherme Felipe Bosger, Rodrigo Bessa Juliao, Hugo de Almeida Ribeiro; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Siebe van Albada. |
 |
| Active Heave Compensating Crane for Loading/Unloading of Platform Supply Vessels (PSV). Students: Ivan Flatval, Ørjan Gjelseth; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Company Contact: Dag Sverre Grønmyr, Rolls Royce Marine. Advisors: Siebe van Albada, Filippo Sanfilippo. |
 |
Supervised Student Projects
Among all the supervised student projects, a selection of them is listed in the following.
| Summer 2015 | |
|---|---|
Grasping and Locomotion for Modular Snake-Like Robots in a Search and Rescue Operations Scenario.Student: Per Myren. Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
| Fall 2014 | |
Wearable Tactile Feedback Integration for Offshore Operations.Students: Bjørn Tomren, Kai Henning Humberset and Rolf-Magnus Hjørungdal; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
A Wave Simulator Framework for Offshore Crane Operations.Students: Håkon Østrem, Håkon Eikrem and Bjarne Humlen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Within the following project: project description. |
 |
A Camera Guided Laser Shooter for Tracking Moving Objects.Students: Birger Skogeng Pedersen and Webjørn Yksnøy Bergmann; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
Advanced Control Methods for a Search & Rescue Drone.Students: Rolf Ottar Rovde, Kristian Østgaard and Kim Gjøran Robertsen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
An Automated Monitoring System for Detecting Suspicious Subjects in Crowded Areas.Students: Benjamin Selvåg Skinnes, Øyvind Valderhaug Strømsheim and Steffen Sunde; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
| Summer 2013 | |
Development of an Integrated Virtual-Prototyping Framework for Designing Modular Robotic Hands.Students: Stian Sandviknes, Ole Jonny Varhaugvik and Andreas Bull Enger; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Summer 2012 | |
Haptic Feedback Integration for Maritime Crane Control.Student: Lars Ivar Hatledal; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Spring 2012 | |
A Modular Grasping Snake Robot.Students: Gøncz Thomas, Frostad Katrine, Hjelme Camilla Hesseberg, Helland Thomas; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
The Demonstrator and Imitator Robots.Students: Ole Martin Longva, Marius Pieroth Skinnes, Christian Steiner Nilsen, Jan Ove Strand; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular 5-Legged Robot.Students: Håkon Sandanger Lunheim, Kenneth Strandabø, Eskil Fjørtoft Breivik, Jonas Roald Nordstrand in one group and Lars Ivar Hatledal, Ådne Heggem and Økland Higraff Espen in another group; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
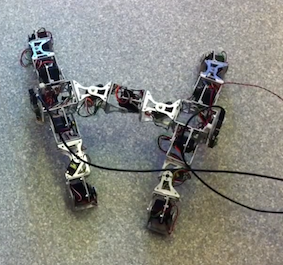
A Modular H-Shaped 4-Legged Robot.Students: Roy Perez Folke-Olsen, Kim Andrè Langelo, Christoffer Flesjø Toverød; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular Robotic Hand with Vision Object Recognition capabilities.Students: Kim Andrè Sund, Kjetil Thorsen, Svein Rune Stangeland, Brita Erica Godfrey; within the course ofMechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering andNatural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
Funding Projects
The work concerning maritime cranes and robot was partly supported by the Research Council of Norway through the Centres of Excellence funding scheme, project number 223254 and the Innovation Programme for Maritime Activities and Offshore Operations, project number 217768. In this context, a close cooperation is established with different partners including Rolls-Royce Marine AS, Norway, Huse Engineering, and the Offshore Simulation Centre AS.
Support was also received from the Centre for Autonomous Marine Operations and Systems (AMOS), Research Council of Norway, Centres of Excellence funding scheme, project number 223254.
Regarding robotic hands, the work was partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT- 2009-4-2-1 program “Cognitive Systems and Robotics” and the Collaborative EU-Project “Hands.dvi” in the context of ECHORD (European Clearing House for Open Robotics Development). In this context, a close cooperation was established with the Department of Advanced Robotics at the Istituto Italiano di Tecnologia, Italy, and the Department of Information Engineering at the University of Siena, Italy.
Filippo Sanfilippo