Tag: virtual reality

Dissemination of the latest results from our AugmentedWearEdu project
Today, Professor Tomas Blažauskas gave a talk to disseminate the latest results from our AugmentedWearEdu project. It was a pleasure to participate to the event organised by Vida Drąsutė at Kaunas University of Technology, Lithuania. This research is funded by the European Union through the Erasmus+ Program under Grant 2020-1-NO01-KA203-076540, project title Integrating virtual and AUGMENTED reality with WEARable technology into engineering EDUcation (AugmentedWearEdu), https://augmentedwear

A Perspective Review on Integrating VR/AR with Haptics into STEM Education for Multi-Sensory Learning
A new paper has been published in the journal of Robotics. The selected article is: Filippo Sanfilippo, Tomas Blazauskas, Gionata Salvietti, Isabel Ramos, Silviu Vert, Jaziar Radianti, Tim A Majchrzak and Daniel Oliveira. A Perspective Review on Integrating VR/AR with Haptics into STEM Education for Multi-Sensory Learning. Robotics 11(2), 2022. URL, DOI BibTeX This research was funded by the European Union through the Erasmus+ Program under Grant 2020-1-NO01-KA

Best Oral Presentation at Session Robots and Artificial Intelligence, ICICT22
I am very glad to announce that our work titled "Mixed reality (MR) Enabled Proprio and Teleoperation of a Humanoid Robot for Paraplegic Patients" has won the Best Oral Presentation at Session 5 "Robots and Artificial Intelligence" at the 5th International Conference on Information and Computer Technologies (ICICT), New York City (virtual), United States, March 4-6, 2022. The awarded paper is: Filippo Sanfilippo, Jesper Smith, Sylvain Bertrand and Tor Halvard Skarberg Svendsen. Mixed reality (M

A Game-based Learning Framework for Controlling Brain-Actuated Wheelchairs
Paraplegia is a disability caused by impairment in motor or sensory functions of the lower limbs. Most paraplegic subjects use mechanical wheelchairs for their movement, however, patients with reduced upper limb functionality may benefit from the use of motorised, electric wheelchairs. Depending on the patient, learning how to control these wheelchairs can be hard (if at all possible), time-consuming, demotivating, and to some extent dangerous. This paper proposes a game-based learning framework

On Usage of EEG Brain Control for Rehabilitation of Stroke Patients
This paper demonstrates rapid prototyping of a stroke rehabilitation system consisting of an interactive 3D virtual reality computer game environment interfaced with an EEG headset for control and interaction using brain waves. The system is intended for training and rehabilitation of partially monoplegic stroke patients and uses low- cost commercial-off-the-shelf products like the Emotiv EPOC EEG headset and the Unity 3D game engine. A number of rehabilitation methods exist that can improve mo

Real world and virtual world: architecture for interconnecting first and Second Life
Publications MJ Callaghan, JG Harkin, G Scibilia, F Sanfilippo, Kerri McCusker and S Wilson. Experiential based learning in 3D Virtual Worlds: Visualization and data integration in Second Life. (Best Conference Paper) in Remote Engineering & Virtual Instrumentation, (REV 2008). 2008. Video Description The integration between real world and the virtual world of Second Life is achieved. A representative 1:1 connection is created between real and virtual objects e.g. if a light source is swit
Supervised Theses
| Spring 2015 | |
|---|---|
| Interfacing an EEG Headset with a 3D Simulation Environment for Rehabilitation in Partially Paraplegic,Stroke Victims. Student: Tom Verplaetse; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Robin Trulssen Bye, Filippo Sanfilippo. |
 |
| On the Usage of Single-Electrode EEG Devices for Biometric-Based Person Identification. Students: Guilherme Felipe Bosger, Rodrigo Bessa Juliao, Hugo de Almeida Ribeiro; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Siebe van Albada. |
 |
| Active Heave Compensating Crane for Loading/Unloading of Platform Supply Vessels (PSV). Students: Ivan Flatval, Ørjan Gjelseth; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Company Contact: Dag Sverre Grønmyr, Rolls Royce Marine. Advisors: Siebe van Albada, Filippo Sanfilippo. |
 |
Supervised Student Projects
Among all the supervised student projects, a selection of them is listed in the following.
| Summer 2015 | |
|---|---|
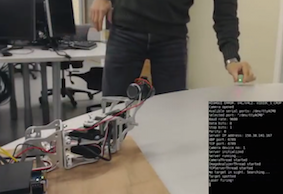
Grasping and Locomotion for Modular Snake-Like Robots in a Search and Rescue Operations Scenario.Student: Per Myren. Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
| Fall 2014 | |
Wearable Tactile Feedback Integration for Offshore Operations.Students: Bjørn Tomren, Kai Henning Humberset and Rolf-Magnus Hjørungdal; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
A Wave Simulator Framework for Offshore Crane Operations.Students: Håkon Østrem, Håkon Eikrem and Bjarne Humlen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Within the following project: project description. |
 |
A Camera Guided Laser Shooter for Tracking Moving Objects.Students: Birger Skogeng Pedersen and Webjørn Yksnøy Bergmann; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
Advanced Control Methods for a Search & Rescue Drone.Students: Rolf Ottar Rovde, Kristian Østgaard and Kim Gjøran Robertsen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
An Automated Monitoring System for Detecting Suspicious Subjects in Crowded Areas.Students: Benjamin Selvåg Skinnes, Øyvind Valderhaug Strømsheim and Steffen Sunde; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
| Summer 2013 | |
Development of an Integrated Virtual-Prototyping Framework for Designing Modular Robotic Hands.Students: Stian Sandviknes, Ole Jonny Varhaugvik and Andreas Bull Enger; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Summer 2012 | |
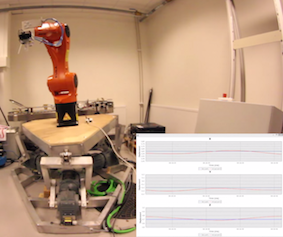
Haptic Feedback Integration for Maritime Crane Control.Student: Lars Ivar Hatledal; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Spring 2012 | |
A Modular Grasping Snake Robot.Students: Gøncz Thomas, Frostad Katrine, Hjelme Camilla Hesseberg, Helland Thomas; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
The Demonstrator and Imitator Robots.Students: Ole Martin Longva, Marius Pieroth Skinnes, Christian Steiner Nilsen, Jan Ove Strand; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular 5-Legged Robot.Students: Håkon Sandanger Lunheim, Kenneth Strandabø, Eskil Fjørtoft Breivik, Jonas Roald Nordstrand in one group and Lars Ivar Hatledal, Ådne Heggem and Økland Higraff Espen in another group; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
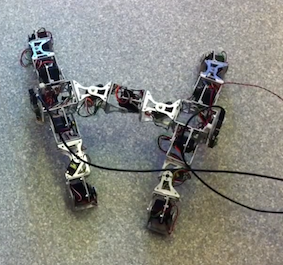
A Modular H-Shaped 4-Legged Robot.Students: Roy Perez Folke-Olsen, Kim Andrè Langelo, Christoffer Flesjø Toverød; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular Robotic Hand with Vision Object Recognition capabilities.Students: Kim Andrè Sund, Kjetil Thorsen, Svein Rune Stangeland, Brita Erica Godfrey; within the course ofMechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering andNatural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
Funding Projects
The work concerning maritime cranes and robot was partly supported by the Research Council of Norway through the Centres of Excellence funding scheme, project number 223254 and the Innovation Programme for Maritime Activities and Offshore Operations, project number 217768. In this context, a close cooperation is established with different partners including Rolls-Royce Marine AS, Norway, Huse Engineering, and the Offshore Simulation Centre AS.
Support was also received from the Centre for Autonomous Marine Operations and Systems (AMOS), Research Council of Norway, Centres of Excellence funding scheme, project number 223254.
Regarding robotic hands, the work was partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT- 2009-4-2-1 program “Cognitive Systems and Robotics” and the Collaborative EU-Project “Hands.dvi” in the context of ECHORD (European Clearing House for Open Robotics Development). In this context, a close cooperation was established with the Department of Advanced Robotics at the Istituto Italiano di Tecnologia, Italy, and the Department of Information Engineering at the University of Siena, Italy.
Filippo Sanfilippo