Tag: robotics

A Game-based Learning Framework for Controlling Brain-Actuated Wheelchairs
Paraplegia is a disability caused by impairment in motor or sensory functions of the lower limbs. Most paraplegic subjects use mechanical wheelchairs for their movement, however, patients with reduced upper limb functionality may benefit from the use of motorised, electric wheelchairs. Depending on the patient, learning how to control these wheelchairs can be hard (if at all possible), time-consuming, demotivating, and to some extent dangerous. This paper proposes a game-based learning framework

On Usage of EEG Brain Control for Rehabilitation of Stroke Patients
This paper demonstrates rapid prototyping of a stroke rehabilitation system consisting of an interactive 3D virtual reality computer game environment interfaced with an EEG headset for control and interaction using brain waves. The system is intended for training and rehabilitation of partially monoplegic stroke patients and uses low- cost commercial-off-the-shelf products like the Emotiv EPOC EEG headset and the Unity 3D game engine. A number of rehabilitation methods exist that can improve mo

3D-printed open-source robot marker holder
An open-source robot marker holder that can be connected to the FESTO Parallel gripper DHPS. This robot marker holder can be 3D-printed by using Fused Deposition Modelling (FDM) manufacturing technology, thus making the rapid-prototyping process very economical and fast. A self-locking mechanism allows for docking the marker in a very reliable way. The pen holder incorporates a metal spring that allows for accommodating a variety of movements for the robot without requiring high accuracy

A Fully-Immersive Haptic, Audio and Visual Experience Framework
This work presents the development of an open-source low-cost framework for a fully-immersive haptic, audio and visual experience. This framework is realised by exclusively adopting commercial off-the-shelf (COTS) components and tools. In particular, vibration actuators and open-source electronics are employed in the design of a pair of novel and inexpensive haptic gloves. These gloves allow for establishing a kinaesthetic link between a human operator interacting with a computer-generated envir

Student Projects Summary for the Real Time Systems at Aalesund University College
I am especially thankful to Professor Webjørn Rekdalsbakken, Department of Engineering and Natural Sciences, Aalesund University College. He gave me the chance to teach Real time computer programming together with Girts Strazdins and with Ivar Blindheim. I really enjoyed this experience. During the last year course in Real Time Systems, our students focused on several challenges that currently affect the filed of maritime applications and related industry. In the following, an overview of the

The New Architecture of ModGrasp for Mind-Controlled Low-Cost Sensorised Modular Hands
Publications F. Sanfilippo, H. Zhang and K. Y. Pettersen. The New Architecture of ModGrasp for Mind-Controlled Low-Cost Sensorised Modular Hands. In Proceeding of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain. 2015, 524–529. Video

Rosetta: the ambition to turn science fiction into science fact
Rosetta is the first mission ever to rendezvous with, escort and land on a comet. A mission that began as a dream, but that after decades of planning, construction and flight through the Solar System, has arrived at its goal.

Joomla based website for the Mechatronics and all AMO Laboratories at Aalesund University College
When I started my PhD studies at Aalesund University College, I gave my contribution to the setting up of the Mechatronics Lab. One major contribution consisted in developing the website for the newly constituted Mechatronics Laboratory. This work has been done as extra in my spare time. The website is based Joomla. Joomla is a free and open-source content management system (CMS) for publishing web content. It is built on a model–view–controller web application framework that can be us

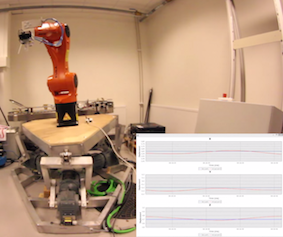
Day 2 - Black & White photo challenge
Day 2 - Black & White photo challenge. I was nominated by Anniken Karlsen and now I nominate Mónica Marchant to post a black & white photo for 5 days and nominate a person each day to do the same - just for fun! This is my second photo, it was taken at the laboratory of Kuka College in Sweden. In this photo, the calibration process for a Kuka robot is shown.

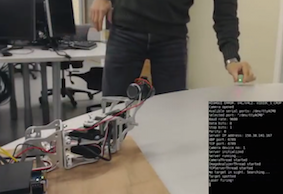
Motor calibration for modular robot
I just made a simple tutorial that can be used for motor calibration when assembling modular robots.

Best PhD poster at Ocean Talent Camp 2014
Ocean Talent Camp is an event that encompasses all offshore industries, and a wide variety of businesses from all around the region of Sunnmøre . Recruitment is the main focus. This event is organised every year by Aalesund University College. During this even all the researchers and PhD students are invited to present their ongoing work by means of a poster exhibition. Quite unexpectedly, one of my poster has been awarded with the price for "Best PhD poster". Here is the awarded poster.
: A Flexible Framework for Alternative Maritime Crane Control Algorithms")
Integrated Flexible Maritime Crane Architecture for the Offshore Simulation Centre AS (OSC): A Flexible Framework for Alternative Maritime Crane Control Algorithms
Publications Filippo Sanfilippo, Lars Ivar Hatledal, Arne Styve, Houxiang Zhang and Kristin Ytterstad Pettersen. Integrated Flexible Maritime Crane Architecture for the Offshore Simulation Centre AS (OSC): A Flexible Framework for Alternative Maritime Crane Control Algorithms. IEEE Journal of Oceanic Engineering PP(99):1-12, 2015. Video Abstract The Offshore Simulator Centre AS (OSC) is the world's most advanced provider of simulators for demanding offshore operations. However, even though
Supervised Theses
| Spring 2015 | |
|---|---|
| Interfacing an EEG Headset with a 3D Simulation Environment for Rehabilitation in Partially Paraplegic,Stroke Victims. Student: Tom Verplaetse; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Robin Trulssen Bye, Filippo Sanfilippo. |
 |
| On the Usage of Single-Electrode EEG Devices for Biometric-Based Person Identification. Students: Guilherme Felipe Bosger, Rodrigo Bessa Juliao, Hugo de Almeida Ribeiro; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Siebe van Albada. |
 |
| Active Heave Compensating Crane for Loading/Unloading of Platform Supply Vessels (PSV). Students: Ivan Flatval, Ørjan Gjelseth; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Company Contact: Dag Sverre Grønmyr, Rolls Royce Marine. Advisors: Siebe van Albada, Filippo Sanfilippo. |
 |
Supervised Student Projects
Among all the supervised student projects, a selection of them is listed in the following.
| Summer 2015 | |
|---|---|
Grasping and Locomotion for Modular Snake-Like Robots in a Search and Rescue Operations Scenario.Student: Per Myren. Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
| Fall 2014 | |
Wearable Tactile Feedback Integration for Offshore Operations.Students: Bjørn Tomren, Kai Henning Humberset and Rolf-Magnus Hjørungdal; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
A Wave Simulator Framework for Offshore Crane Operations.Students: Håkon Østrem, Håkon Eikrem and Bjarne Humlen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Within the following project: project description. |
 |
A Camera Guided Laser Shooter for Tracking Moving Objects.Students: Birger Skogeng Pedersen and Webjørn Yksnøy Bergmann; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
Advanced Control Methods for a Search & Rescue Drone.Students: Rolf Ottar Rovde, Kristian Østgaard and Kim Gjøran Robertsen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
An Automated Monitoring System for Detecting Suspicious Subjects in Crowded Areas.Students: Benjamin Selvåg Skinnes, Øyvind Valderhaug Strømsheim and Steffen Sunde; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
| Summer 2013 | |
Development of an Integrated Virtual-Prototyping Framework for Designing Modular Robotic Hands.Students: Stian Sandviknes, Ole Jonny Varhaugvik and Andreas Bull Enger; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Summer 2012 | |
Haptic Feedback Integration for Maritime Crane Control.Student: Lars Ivar Hatledal; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Spring 2012 | |
A Modular Grasping Snake Robot.Students: Gøncz Thomas, Frostad Katrine, Hjelme Camilla Hesseberg, Helland Thomas; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
The Demonstrator and Imitator Robots.Students: Ole Martin Longva, Marius Pieroth Skinnes, Christian Steiner Nilsen, Jan Ove Strand; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular 5-Legged Robot.Students: Håkon Sandanger Lunheim, Kenneth Strandabø, Eskil Fjørtoft Breivik, Jonas Roald Nordstrand in one group and Lars Ivar Hatledal, Ådne Heggem and Økland Higraff Espen in another group; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
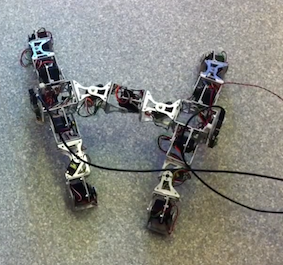
A Modular H-Shaped 4-Legged Robot.Students: Roy Perez Folke-Olsen, Kim Andrè Langelo, Christoffer Flesjø Toverød; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular Robotic Hand with Vision Object Recognition capabilities.Students: Kim Andrè Sund, Kjetil Thorsen, Svein Rune Stangeland, Brita Erica Godfrey; within the course ofMechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering andNatural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
Funding Projects
The work concerning maritime cranes and robot was partly supported by the Research Council of Norway through the Centres of Excellence funding scheme, project number 223254 and the Innovation Programme for Maritime Activities and Offshore Operations, project number 217768. In this context, a close cooperation is established with different partners including Rolls-Royce Marine AS, Norway, Huse Engineering, and the Offshore Simulation Centre AS.
Support was also received from the Centre for Autonomous Marine Operations and Systems (AMOS), Research Council of Norway, Centres of Excellence funding scheme, project number 223254.
Regarding robotic hands, the work was partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT- 2009-4-2-1 program “Cognitive Systems and Robotics” and the Collaborative EU-Project “Hands.dvi” in the context of ECHORD (European Clearing House for Open Robotics Development). In this context, a close cooperation was established with the Department of Advanced Robotics at the Istituto Italiano di Tecnologia, Italy, and the Department of Information Engineering at the University of Siena, Italy.
Filippo Sanfilippo