Tag: artificial intelligence

Step Towards Secure and Reliable Smart Grids in Industry 5.0: A Federated Learning assisted Hybrid Deep Learning Model for Electricity Theft Detection using Smart Meters
Step Towards Secure and Reliable Smart Grids in Industry 5.0: A Federated Learning assisted Hybrid Deep Learning Model for Electricity Theft Detection using Smart Meters.I am very excited to share our newly published article authored by: Muhammad Hamza Zafar, Syed Muhammad Salman Bukhari, Mohamad Abou Houran, Syed Kumayl Raza Moosavi, Majad Mansoor, Nedaa Al-Tawalbeh, and Filippo SanfilippoAbstractThe integration of Smart Grid technology and conceptual Industry 5.0 has paved the way fo

A comprehensive framework for hand gesture recognition using hybrid-metaheuristic algorithms and deep learning models
I'm happy to share our recent paper: Hassan Mohyuddin, Syed Kumayl Raza Moosavi, Muhammad Hamza Zafar and Filippo Sanfilippo. A comprehensive framework for hand gesture recognition using hybrid-metaheuristic algorithms and deep learning models. Array, 2023. ???? Access the paper here: Read It Now ???? Key Insights: We harnessed data from a Leap Motion Controller (LMC) and a unique Spotted Hyena-based Chimp Optimization Algorithm (SSC) to select crucial features and train deep neural networ
 Algorithm for Engineering Design Problems-323_L.png "Improved Barnacles Movement Optimizer (IBMO) Algorithm for Engineering Design Problems")
Improved Barnacles Movement Optimizer (IBMO) Algorithm for Engineering Design Problems
Exciting News! I am thrilled to announce the publication of our paper titled "Improved Barnacles Movement Optimizer (IBMO) Algorithm for Engineering Design Problems" in the Proceedings of the 22nd International Conference on Artificial Intelligence and Soft Computing (ICAISC 2023) held in Zakopane, Poland. I am grateful to all my co-authors for their incredible contributions! Syed Kumayl Raza Moosavi presented the paper at the conference and received very good and constructive feedback!

Improved Reptile Search Optimization Algorithm: Application on Regression and Classification Problems
Exciting news! Our team has just published a new article titled "Improved Reptile Search Optimization Algorithm: Application on Regression and Classification Problems" in the journal of Applied Sciences. I am grateful to all my co-authors for their incredible contributions! Khan, Muhammad Kamran, Muhammad Hamza Zafar, Saad Rashid, Majad Mansoor, Syed Kumayl Raza Moosavi, and Filippo Sanfilippo. "Improved Reptile Search Optimization Algorithm: Application on Regression a

NAIS 2022 Keynote: AI- and Robotics-enabled systems, a forward leap into real life applications
Looking forward to presenting my keynote titled “AI- and Robotics-enabled systems, a forward leap into real life applications” at the 2022 symposium of the Norwegian AI Society on May 31 - June 1, OsloMet - Oslo Metropolitan University. AI- and Robotics-enabled systems are becoming more and more relevant for real life applications. This technology may enable society to a conceptual leap forward especially concerning demanding real-life scenarios. In this talk, different scenarios wi

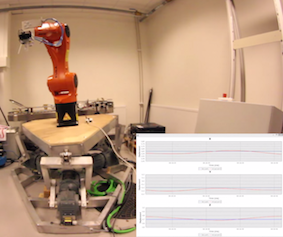
Forward Kinematic Modelling with Radial Basis Function Neural Network Tuned with a Novel Meta-Heuristic Algorithm for Robotic Manipulators
A new paper has been published in the journal of Robotics. The selected article is: Syed Kumayl Raza Moosavi, Muhammad Hamza Zafar and Filippo Sanfilippo. Forward Kinematic Modelling with Radial Basis Function Neural Network Tuned with a Novel Meta-Heuristic Algorithm for Robotic Manipulators. Robotics 11(2), 2022. URL, DOI BibTeX This research is supported by the Top Research Centre Mechatronics (TRCM), University of Agder (UiA), Norway, https://www.uia.n

Adaptive ML-based technique for renewable energy system power forecasting in hybrid PV-Wind farms power conversion systems
A new paper has been published in the journal Energy Conversion and Management. The selected article is: Muhammad Hamza Zafar, Noman Mujeeb Khan, Majad Mansoor, Adeel Feroz Mirza, Syed Kumayl Raza Moosavi, Filippo Sanfilippo. Adaptive ML-based technique for renewable energy system power forecasting in hybrid PV-Wind farms power conversion systems. Energy Conversion and Management, Volume 258, 2022, 115564, ISSN 0196-8904, https://doi.org/10.1016/j.enconman.2022.115564. This work is supported b

The Centre for Integrated Emergency Management (CIEM) is granted status as priority research centre (PRIFORSK)
Congratulations to all the team at CIEM - Centre for Integrated Emergency Management which is now a priority research centre at University of Agder (UiA). It's a pleasure to be a part of this great research environment. Daniel Romero and I lead the cluster Technologies for Augmenting Response Capabilities in Emergency Management Operations at CIEM.
")
The 4th International Conference on Intelligent Technologies and Applications (INTAP'21)
The 4th International Conference on Intelligent Technologies and Applications (INTAP'21) was held on 11-13 October, 2021 at the University of Agder (UiA), Grimstad, Norway. INTAP'21 was co-organised by the University of Agder (UiA) and by Oslo Metropolitan University (OsloMet) with the support of the Top Research Centre Mechatronics (TRCM), UiA, and the Artificial Intelligence Research Group (AIRG), Islamia University of Bahawalpur (IUB), Pakistan. Internationally recognised keynote speakers

Open PhD Fellowships in Robotics, AI, smart cities, intelligent health. Join our team!
Do you want to join our vibrant and motivated research team at OsloMet – Oslo Metropolitan University, and start your research journey in the field of robotics, artificial intelligence, intelligent health, smart cities? The following three exciting PhD Fellowships are currently open for application:

Keynote speaker at the International Conference on Intelligent Technologies and Applications INTAP 2019
On behalf of the University of Agder (UiA) and of Oslo Metropolitan university (OsloMet), I was delighted and honoured to be invited as a keynote speaker at the International Conference on Intelligent Technologies and Applications (INTAP), 6-8 November, 2019, Bahawalpur Pakistan.
 board meeting in Oslo")
The Norwegian Artificial Intelligence Society (NAIS) board meeting in Oslo
The Norwegian Artificial Intelligence Society (NAIS) was established in October 1985 as a representative body for the Norwegian Artificial Intelligence community. Its aim is to promote the study, research and application of Artificial Intelligence in Norway. NAIS is a member of the European Association for Artificial Intelligence (EurAI).
Supervised Theses
| Spring 2015 | |
|---|---|
| Interfacing an EEG Headset with a 3D Simulation Environment for Rehabilitation in Partially Paraplegic,Stroke Victims. Student: Tom Verplaetse; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Robin Trulssen Bye, Filippo Sanfilippo. |
 |
| On the Usage of Single-Electrode EEG Devices for Biometric-Based Person Identification. Students: Guilherme Felipe Bosger, Rodrigo Bessa Juliao, Hugo de Almeida Ribeiro; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Siebe van Albada. |
 |
| Active Heave Compensating Crane for Loading/Unloading of Platform Supply Vessels (PSV). Students: Ivan Flatval, Ørjan Gjelseth; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Company Contact: Dag Sverre Grønmyr, Rolls Royce Marine. Advisors: Siebe van Albada, Filippo Sanfilippo. |
 |
Supervised Student Projects
Among all the supervised student projects, a selection of them is listed in the following.
| Summer 2015 | |
|---|---|
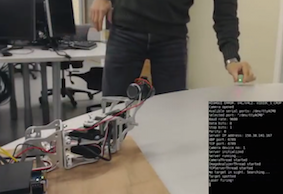
Grasping and Locomotion for Modular Snake-Like Robots in a Search and Rescue Operations Scenario.Student: Per Myren. Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
| Fall 2014 | |
Wearable Tactile Feedback Integration for Offshore Operations.Students: Bjørn Tomren, Kai Henning Humberset and Rolf-Magnus Hjørungdal; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
A Wave Simulator Framework for Offshore Crane Operations.Students: Håkon Østrem, Håkon Eikrem and Bjarne Humlen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Within the following project: project description. |
 |
A Camera Guided Laser Shooter for Tracking Moving Objects.Students: Birger Skogeng Pedersen and Webjørn Yksnøy Bergmann; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
Advanced Control Methods for a Search & Rescue Drone.Students: Rolf Ottar Rovde, Kristian Østgaard and Kim Gjøran Robertsen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
An Automated Monitoring System for Detecting Suspicious Subjects in Crowded Areas.Students: Benjamin Selvåg Skinnes, Øyvind Valderhaug Strømsheim and Steffen Sunde; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
| Summer 2013 | |
Development of an Integrated Virtual-Prototyping Framework for Designing Modular Robotic Hands.Students: Stian Sandviknes, Ole Jonny Varhaugvik and Andreas Bull Enger; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Summer 2012 | |
Haptic Feedback Integration for Maritime Crane Control.Student: Lars Ivar Hatledal; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Spring 2012 | |
A Modular Grasping Snake Robot.Students: Gøncz Thomas, Frostad Katrine, Hjelme Camilla Hesseberg, Helland Thomas; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
The Demonstrator and Imitator Robots.Students: Ole Martin Longva, Marius Pieroth Skinnes, Christian Steiner Nilsen, Jan Ove Strand; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular 5-Legged Robot.Students: Håkon Sandanger Lunheim, Kenneth Strandabø, Eskil Fjørtoft Breivik, Jonas Roald Nordstrand in one group and Lars Ivar Hatledal, Ådne Heggem and Økland Higraff Espen in another group; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
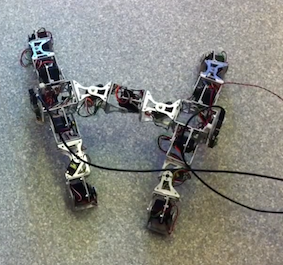
A Modular H-Shaped 4-Legged Robot.Students: Roy Perez Folke-Olsen, Kim Andrè Langelo, Christoffer Flesjø Toverød; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular Robotic Hand with Vision Object Recognition capabilities.Students: Kim Andrè Sund, Kjetil Thorsen, Svein Rune Stangeland, Brita Erica Godfrey; within the course ofMechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering andNatural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
Funding Projects
The work concerning maritime cranes and robot was partly supported by the Research Council of Norway through the Centres of Excellence funding scheme, project number 223254 and the Innovation Programme for Maritime Activities and Offshore Operations, project number 217768. In this context, a close cooperation is established with different partners including Rolls-Royce Marine AS, Norway, Huse Engineering, and the Offshore Simulation Centre AS.
Support was also received from the Centre for Autonomous Marine Operations and Systems (AMOS), Research Council of Norway, Centres of Excellence funding scheme, project number 223254.
Regarding robotic hands, the work was partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT- 2009-4-2-1 program “Cognitive Systems and Robotics” and the Collaborative EU-Project “Hands.dvi” in the context of ECHORD (European Clearing House for Open Robotics Development). In this context, a close cooperation was established with the Department of Advanced Robotics at the Istituto Italiano di Tecnologia, Italy, and the Department of Information Engineering at the University of Siena, Italy.
Filippo Sanfilippo