Tag: aalesund
")
Best Poster Award at the Proceeding of the 11th IEEE International Conference on Innovations in Information Technology (IIT’15)
I am very glad to announce that our work titled "Fully-Immersive Hapto-Audio-Visual Framework for Remote Touch" has been awarded as the "Best Student Poster" at the Proceeding of the 11th IEEE International Conference on Innovations in Information Technology (IIT’15), Dubai, United Arab Emirates, November 1-3, 2015.


Programming modular snake robots with Arduino, Aalesund University College
Here a small presentation that I have prepared for our students so that they can learn how to program modular snake robots.


A perfect Airbnb rental for Norway's most beautiful town, Ålesund
Get 20 dollars (or 300 nok)Airbnb credit coupon, just sign up by following this link: www.airbnb.com/c/fsanfilippo Ålesund is arguably Norway's most beautiful fjord town, situated on the coast line between Bergen and Molde. It is the entry point for the deep blue UNESCO-protected Geirangerfjord. The rule of thumb therefore is to stay somewhere that matches the beauty of the city and in a country where non business character hotels are tough to find. This Airbnb* rental place looks like the pe

Innotown 2014, an experience that challenges your usual mindset
InnoTown Conference was established in 2000, and is regarded as one of the Premier Business&innovation Conference in Europe. Every year InnoTown curates an acclaimed program of world-class speakers that is truly engaging for anyone with an international and innovative outlook.

Aalesund University College delegation at ECMS 2014
A group photo of the delegates of Aalesund University College at the European Conference on Modelling and Simulation (ECMS 2014), Brescia, Italy.

Modular grasping snake robot
This is another student project at Aalesund University College, Mechatronics course (Spring semester 2012). The main idea of this project consists in developing a modular snake robot capable of grasping objects. The initial mockup of the project is described in the figure below.

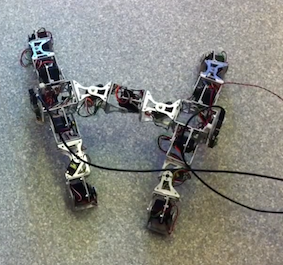
Modular H-shaped four-legged robot
This is another student project at Aalesund University College, Mechatronics course (Spring semester 2012). The main idea of this project consists of developing a modular "H"-shaped four-legged robot. The robot should have the pose and locomotion capabilities of standing, crawling, turning, and lateral crawling, ... The initial mockup of the project is described in the figure below.

Modular five legged robot
This is another student project at Aalesund University College, Mechatronics course (Spring semester 2012). The main idea of this project consists of developing a modular five-limbed robot. The goal is to develop a versatile robotic mobile platform featuring an easy-to-build mechanical structure, various locomotion capabilities and high manipulation flexibility. The initial mockup of the project is described in the image below.

The demonstrator and imitator robots
This post describe another project that I have assigned to our students at Aalesund University College while teaching mechatronics. In particular, this project addresses the problem of body mapping in robotic imitation where the demonstrator and imitator robots may not share the same embodiment (degrees of freedom, body morphology, constraints and so on).

VIDEO: Sykkelløp, a motorcycle race competition at AAUC
Sykkelløp, this is the norwegian word for the motorcycle race competition that involves our first year students at Aalesund University College. This competition became a tradition, since it has been hold for several years now. It is a way to motivate our students in working in teams on the design or redesign of motorcycles and other kind of vehicles. Our students have the chance to learn about mechanics and to apply this knowledge in a very practical way. This competition has been organised und
Supervised Theses
| Spring 2015 | |
|---|---|
| Interfacing an EEG Headset with a 3D Simulation Environment for Rehabilitation in Partially Paraplegic,Stroke Victims. Student: Tom Verplaetse; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Robin Trulssen Bye, Filippo Sanfilippo. |
 |
| On the Usage of Single-Electrode EEG Devices for Biometric-Based Person Identification. Students: Guilherme Felipe Bosger, Rodrigo Bessa Juliao, Hugo de Almeida Ribeiro; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Siebe van Albada. |
 |
| Active Heave Compensating Crane for Loading/Unloading of Platform Supply Vessels (PSV). Students: Ivan Flatval, Ørjan Gjelseth; BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Company Contact: Dag Sverre Grønmyr, Rolls Royce Marine. Advisors: Siebe van Albada, Filippo Sanfilippo. |
 |
Supervised Student Projects
Among all the supervised student projects, a selection of them is listed in the following.
| Summer 2015 | |
|---|---|
Grasping and Locomotion for Modular Snake-Like Robots in a Search and Rescue Operations Scenario.Student: Per Myren. Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
| Fall 2014 | |
Wearable Tactile Feedback Integration for Offshore Operations.Students: Bjørn Tomren, Kai Henning Humberset and Rolf-Magnus Hjørungdal; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. |
 |
A Wave Simulator Framework for Offshore Crane Operations.Students: Håkon Østrem, Håkon Eikrem and Bjarne Humlen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Within the following project: project description. |
 |
A Camera Guided Laser Shooter for Tracking Moving Objects.Students: Birger Skogeng Pedersen and Webjørn Yksnøy Bergmann; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
Advanced Control Methods for a Search & Rescue Drone.Students: Rolf Ottar Rovde, Kristian Østgaard and Kim Gjøran Robertsen; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
An Automated Monitoring System for Detecting Suspicious Subjects in Crowded Areas.Students: Benjamin Selvåg Skinnes, Øyvind Valderhaug Strømsheim and Steffen Sunde; within the course of Real-time computer programming, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo, Girts Strazdins, Ivar Blindheim and Webjørn Rekdalsbakken. Link: project demo. |
 |
| Summer 2013 | |
Development of an Integrated Virtual-Prototyping Framework for Designing Modular Robotic Hands.Students: Stian Sandviknes, Ole Jonny Varhaugvik and Andreas Bull Enger; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Summer 2012 | |
Haptic Feedback Integration for Maritime Crane Control.Student: Lars Ivar Hatledal; Student Summer Job within the BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Within the following project: project description. |
 |
| Spring 2012 | |
A Modular Grasping Snake Robot.Students: Gøncz Thomas, Frostad Katrine, Hjelme Camilla Hesseberg, Helland Thomas; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
The Demonstrator and Imitator Robots.Students: Ole Martin Longva, Marius Pieroth Skinnes, Christian Steiner Nilsen, Jan Ove Strand; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular 5-Legged Robot.Students: Håkon Sandanger Lunheim, Kenneth Strandabø, Eskil Fjørtoft Breivik, Jonas Roald Nordstrand in one group and Lars Ivar Hatledal, Ådne Heggem and Økland Higraff Espen in another group; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular H-Shaped 4-Legged Robot.Students: Roy Perez Folke-Olsen, Kim Andrè Langelo, Christoffer Flesjø Toverød; within the course of Mechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering and Natural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
A Modular Robotic Hand with Vision Object Recognition capabilities.Students: Kim Andrè Sund, Kjetil Thorsen, Svein Rune Stangeland, Brita Erica Godfrey; within the course ofMechatronics, robots and deck machines, BSc in Automation Engineering, Department of Engineering andNatural Sciences, AAUC. Advisors: Filippo Sanfilippo and Houxiang Zhang. Link: project description. |
 |
Funding Projects
The work concerning maritime cranes and robot was partly supported by the Research Council of Norway through the Centres of Excellence funding scheme, project number 223254 and the Innovation Programme for Maritime Activities and Offshore Operations, project number 217768. In this context, a close cooperation is established with different partners including Rolls-Royce Marine AS, Norway, Huse Engineering, and the Offshore Simulation Centre AS.
Support was also received from the Centre for Autonomous Marine Operations and Systems (AMOS), Research Council of Norway, Centres of Excellence funding scheme, project number 223254.
Regarding robotic hands, the work was partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT- 2009-4-2-1 program “Cognitive Systems and Robotics” and the Collaborative EU-Project “Hands.dvi” in the context of ECHORD (European Clearing House for Open Robotics Development). In this context, a close cooperation was established with the Department of Advanced Robotics at the Istituto Italiano di Tecnologia, Italy, and the Department of Information Engineering at the University of Siena, Italy.
Filippo Sanfilippo